Det er ret almindeligt for mennesker - især dem, der arbejder i fremstilling - at binde en knude, fjerne kappen af et kabel, indsætte en stift i et hul eller bruge et håndværktøj såsom en bor. De kan virke som enkle opgaver, men er virkelig meget komplekse og involverer ekstremt fine finger- og håndbevægelser.
Relateret indhold
- Hvordan robotter forlod laboratoriet og begyndte at hjælpe mennesker
Selvom robotter bliver mere og mere involveret i fabriksarbejde og i en lang række andre typer job - inklusive i servicebranchen og sundhedsvæsenet - er deres fingerfærdighed ikke næsten lige så imponerende. Siden folk først bragte dem til at arbejde i bilfabrikker for mere end 50 år siden, har vi bygget robotter, der kan svejse, male og samle dele ganske godt. Dagens bedste robothænder kan hente velkendte genstande og flytte dem til andre steder - såsom at tage produkter fra lagerpladser og lægge dem i kasser.
Men robotter kan ikke orientere et håndværktøj ordentligt - sige, foret en Phillips-hovedskruetrækker op med rillerne på en skrue eller sigtet en hammer mod en søm. Og de kan bestemt ikke bruge to hænder sammen på detaljerede måder, som at udskifte batterierne i en fjernbetjening.
Menneskerhænder er fremragende til disse opgaver og meget mere. For endda at komme tæt på at konkurrere med, hvad vores hænder let er i stand til, har robothænder brug for bedre smidighed, pålidelighed og styrke - og de er nødt til at være i stand til at føle mere præcist og bevæge sig endnu mere fint, end de gør nu, for at finde ud af, hvad de ” re holder og hvordan man griber det bedst. For at robotter skal kunne arbejde sammen med mennesker, bliver vi nødt til at finde ud af, hvordan man laver robotter, der bogstaveligt talt kan give os en hånd, når vores egne to ikke er nok.
Min forskningsgruppe ved det nordøstlige universitet arbejder på at gøre netop dette, især for humanoide robotter som NASAs Valkyrie, der har tre fingre og en tommelfinger på hver hånd. Hvert ciffer har knokelignende samlinger, og hver hånd har et håndled, der let kan rotere. Vi arbejder på at skabe bevægelser - kombinationer af arm-, håndleds-, finger- og tommelfingerbevægelser, der kollektivt udfører en opgave, som at flytte en skruenøgle i en cirkel for at stramme en bolt eller trække en vogn fra et sted til et andet.
 Hver af disse industrielle robotter har flere specialiserede værktøjer. Kunne mange af deres opgaver udføres med robothænder? (Steve Jurvetson / flickr, CC BY)
Hver af disse industrielle robotter har flere specialiserede værktøjer. Kunne mange af deres opgaver udføres med robothænder? (Steve Jurvetson / flickr, CC BY) Betydningen af hænder
I stedet for at gøre hver robot til en brugerdefineret maskine, der er skræddersyet til en meget specifik opgave, er vi nødt til at designe flere anvendte robotter eller endda sådanne dygtige maskiner, som de måske kaldes ”generelle formål” - godt til næsten enhver opgave. En nøgle til succes for disse typer robotter vil være fremragende hænder.
Vores arbejde fokuserer på at designe en ny klasse af tilpasningsdygtige robothænder, der er i stand til præcise fine bevægelser og autonome greb. Når robotter er i stand til at hamre i søm, skifte batterier og foretage andre lignende bevægelser - basale for mennesker, men meget komplekse for robotter - er vi godt på vej til menneskelignende fingerfærdighed i robothænder.
Opnåelse af dette mål involverer også opfindelsen af nye mønstre, der indeholder hårde og bløde elementer - den måde, menneskelig knogler giver styrke til et greb med, når huden spreder trykket, så et vinglas ikke knuses.
Hurtigere udvikling og test
Moderne teknologiske forbedringer gør udviklingsprocessen lettere. Med 3D-udskrivning kan vi lave prototyper meget hurtigt. Vi kan endda fremstille engangskomponenter til lave omkostninger til at prøve forskellige arrangementer af mekanismer, som f.eks. To- eller trefingerede gribere til enkle pick-and-place-opgaver eller antropomorfe robothænder til mere sarte operationer.
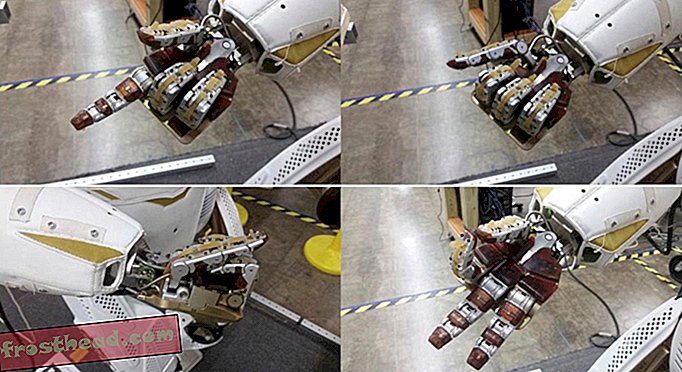 Forskellige typer hænder på en NASA Valkyrie-robot. (Northeastern University, CC BY-ND)
Forskellige typer hænder på en NASA Valkyrie-robot. (Northeastern University, CC BY-ND) Når elektroniske kameraer og sensorer bliver mindre, er vi i stand til at integrere dem på nye måder. Hvis vi for eksempel lægger tryksensorer og kameraer i en robothånd, kan de give feedback til robotcontrolleren (hvad enten det er menneske eller automatiseret), når et greb er sikkert, eller hvis noget begynder at glide. En dag kan de muligvis mærke i hvilken retning glideobjektet bevæger sig, så roboten kan fange den.
Disse evner er allerede anden natur for mennesker gennem vision og propriosception (evnen til at føle de relative positioner af kropsdele uden at se eller tænke over det). Når vi først er i stand til at opnå dem i robotter, vil de være i stand til at gøre ting som at opdage, om et greb er for stærkt og klemmer et objekt for hårdt.
Planlægning af koordinerede bevægelser
En anden milepæl vil være at udvikle metoder til robotter til at finde ud af, hvilke bevægelser de har brug for i realtid, herunder at mærke, hvad der foregår i deres hænder på hvert øjeblik. Hvis en robothånd kan registrere ændringer i genstande, den håndterer, eller manipulere genstande, mens de er i besiddelse af dem, kan de hjælpe med de almindelige manuelle opgaver som knobbindning og trådstripping.
At arbejde med to hænder sammen er endnu længere ind i fremtiden, skønt det ville give et markant løft, især til fremstilling. En robot, der kan betjene et bor med to hænder eller passere maskindele fra den ene hånd til den anden, ville være store forbedringer, hvilket gør det muligt for fabrikker at automatisere endnu flere trin i deres processer.
 Er dette fremtidens robot? (NASA)
Er dette fremtidens robot? (NASA) Vi mennesker har ikke udviklet disse systemer endnu. Opnåelse af menneskelignende autonom robotfærdighed vil holde robotforskere, teknologer og innovatører travlt i en overskuelig fremtid. Det vil ikke bremse den igangværende robotikrevolution inden for fremstilling, fordi de nuværende processer stadig har masser af plads til automatisering for at forbedre sikkerhed, hastighed og kvalitet. Men når vi gør robotter endnu bedre, vil de være i stand til at give os en hånd.
Denne artikel blev oprindeligt offentliggjort på The Conversation.
Taskin Padir, lektor i elektroteknologi og computerteknik, det nordøstlige universitet