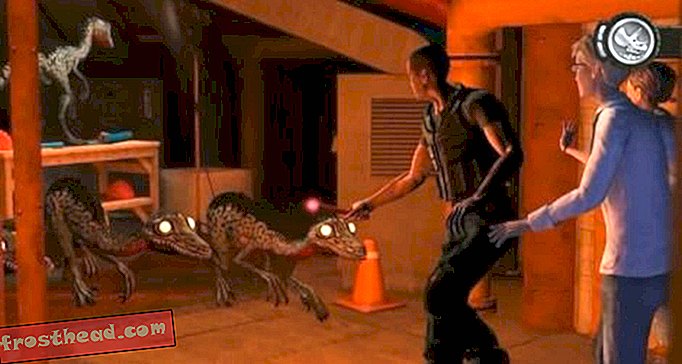
Forskere brugte miniatyrrobotter til at efterligne, hvordan virkelige myrer manøvrerer netværk af deres egne. Kredit: Simon Garnier, et al
For myrer er de feromonbelastede foderstier, de efterlader, som livslinjer: De dirigerer arbejderne mod madknudepunkter, der blev opdaget tidligere, og hjælper dem med at lede hjem tilbage til deres rede.
Disse netværk af stier kan strække sig i hundreder af fod, og det er virkelig præstationen i betragtning af at mange arbejdende myrer er under halvdelen en tomme i længden. En type høstmyr kan lægge et sæt stier (PDF), der strækker sig 82 meter fra indgangen til dens rede. Stierne af en træmyr, et insekt, der måler kun fem millimeter (det er en femtedel af en tomme), når 656 fod, hvor hver enkelt forgrener sig til flere stier på op til 10 pletter på hver sti. Leacuttermyren kan opbygge et netværk, der spreder sig i næsten to og en halv hektar.
Myrearter som disse har en tendens til at tage den korteste sti mellem deres koloniens rede og en fødekilde, efter grene, der strejker så lidt som muligt fra den retning, hvor de begyndte deres rejse. Gaflerne i deres netværk af stier, kendt som bifurcations, er ikke symmetriske og forgrener sig ikke i vinkler af samme størrelse. Men bruger myrer en sofistikeret følelse af geometri til at spore deres sti og måle vinklerne på veje, inden de vælger en?
For at lære mere brugte forskere ved New Jersey Institute of Technology (NJIT) og Research Center on Animal Cognition i Frankrig miniature-robotter til at gentage opførslen af en koloni af argentinske myrer på farten, rapporteret i dag i tidsskriftet PLOS Computational Biology . Denne maurart har ekstremt dårlig syn og dart rundt i høje hastigheder, men alligevel kan den manøvrere gennem korridor efter korridor, fra hjem til mad og vice versa.
Når der ikke er nogen hindringer, foretrækker myrer at gå i en lige linje uden at afvige fra deres kurs. Folk er også sådan: Hvis vi gik ned ad en gade til en restaurant, der er på den samme side af vejen som vi er, ville vi ikke krydse til den modsatte fortov, medmindre noget blokerede for vores måde. For at sætte denne følelse af hindring i robotterne programmerede forskere dem til at undgå forhindringer og følge lette stier, som forskerne brugte som erstatning for feromonbelagte stier.

En "Alice", en lille robot, der måler to centimeter (kun mindre end en tomme), efter et lysspor ved hjælp af to fotoreseptorer . Kredit: Simon Garnier, et al
De 10 bittesmå robotter i denne undersøgelse, kaldet Alices, fik derefter til opgave at navigere i et labyrintlignende miljø omtrent 60 til 70 gange deres størrelse, fra et udgangspunkt, der repræsenterede en rede indgang til et slutpunkt, der betegner en fødekilde. To fotoreceptorer, der efterligner antantenne, detekterede lysstråler. Da robotterne rejste gennem labyrinten, introducerede forskere en skruenøgle i de små maskiners planer - på tilfældige punkter i deres rejse blev robotterne udløst til at dreje, en mekanisme, der er beregnet til yderligere at efterligne myrer 'slyngende gang, når de kryber langs deres stier . Disse tilfældige svinger drejede i vinkler højst 30 grader, da reelle myrer ikke er særlig effektive til fysisk at foretage U-sving .
I den fremskyndede video nedenfor testede forskerne Alices 'navigationsevner i et komplekst netværk og ladede dem vælge den korteste rute mellem deres "rede" (til højre) til en "madkilde (til venstre). Varierende lysstråler, der projiceres på labyrinten, ændrede roboternes bevægelser inde i netværket, da deres fotoreseptorer sparkede i handling.
Forskerne fandt ud af, at robotmyrer, uden nogen viden om labyrintenes geometri, opførte sig nøjagtigt som virkelige myrer gør: De lavede små tilfældige vendinger, men bevægede sig i samme generelle retning. Da de nåede en gaffel i vejen, førte dette til, at robotterne valgte den sti, der mindst afvigede fra deres oprindelige bane , selvom de ikke var udstyret til at måle nogen vinkler. Da de opdagede en lyssti, vendte de sig for at følge den sti.
Forskerne siger, at dette betyder, at argentinske myrer muligvis ikke har brug for at bruge komplekse kognitive processer til at beregne geometrien for forskellige stier. Men at tage gaffelen i vejen, der fører til den korteste rute til mad, øger kraftigt foderfremstillingssuccesen for en hel koloni. Så ved at bruge feromoner med en intuitiv rumlig viden om hvor mad kan være, holder myrer på rette spor; Når flere myrer følger stien til mad, bliver feromoner mere koncentrerede langs stien, hvilket yderligere hjælper med at guide myrer, der endnu ikke har rejst. Faktisk tredobler navigationsmetoden til at vælge den rigtige gaffel i vejen mængden af madmyrer tilbage til deres reden, end hvis de var afhængige af feromoner alene, siger hovedforfatter Simon Garnier, en biologiprofessor ved NJIT.
"Hvis du kun har feromoner, og du ikke har dette trick, er du mindre effektiv, fordi du mere sandsynligt får myrerne fanget i løkker, " siger Garnier, der driver instituttets Swarm Lab, der studerer insektgruppe opførsel. ”Så de vil forstærke deres sti rundt om løkken, og de vil bare sidde fast i denne løkke og dreje og dreje for evigt.”
En sådan navigation kan også hjælpe med at guide myrer gennem underjordiske stier, der forbinder forskellige dele af deres reden. Replikering af disse naturlige navigationsværktøjer gør det muligt for forskere bedre at forstå den indre virkning af kollektiv dyreopførsel.